–Input Voltage Range: Typically 18-36 VDC (isolated), providing flexibility in system integration12.
–Operating Temperature Range: -22°F to 158°F (-30°C to 70°C), suitable for a wide range of environmental conditions12.
–Display: 8.4-inch LCD screen, offering a clear and intuitive interface for monitoring and control12.
–Communication: Equipped with Modbus communication port, enabling integration with other control systems for data exchange and remote monitoring1.
Dimensions & Weight:
–Dimensions: Approximately 170mm x 105mm x 32mm, a compact size for easy installation and integration4.
–Weight: Specific weight may vary, but as a compact industrial control module, it is designed to be lightweight for handling and mounting.
Series:
Woodward 8200-1302 is part of the 505D series of digital governors, known for their reliability and advanced control capabilities5.
argument
Rated input voltage: 18-32 V dc
Rated operating temperature range: -20 to +70 °C
specification
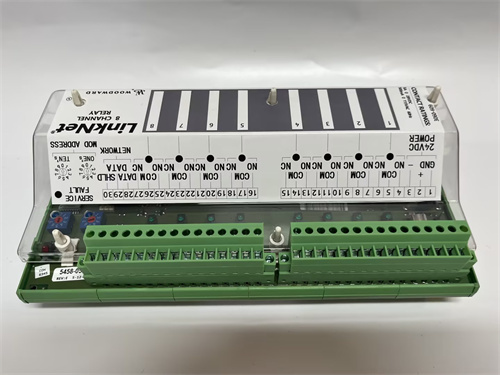
Series: EGCP-3 engine generator control package, Load sharing (LS) model series
Design: Microprocessor-based unit design for working with other LS units
trait
Digital control operation interface: includes two backlit LCD screens for simultaneous monitoring and adjustment of relevant parameters, can display eight lines of status information, the user can choose four lines of configuration or view alarm log information
Start/stop sequence control: with display/keyboard interface for local setup/monitoring
ServLink communication serial link: allows users to access other configuration points (as well as standard configuration points) through Watch Window software
Nine status menus: Easy monitoring and troubleshooting
Built-in security: protection against unauthorized configuration changes and alert log cleanup
argument
Input voltage: +24 Vdc 1 A (Some sources mention that the input voltage range may be 12-48VDC, but this may be a variation for specific applications or configurations)
Operating temperature: -4 to +140 F (or -20°C to +50°C, depending on the conversion method from different sources)
Storage temperature: -40 to +185 ° F (or -40 to +70°C, depending on conversion method)
Humidity standard: 20 and 55°C, 95% for 48 hours
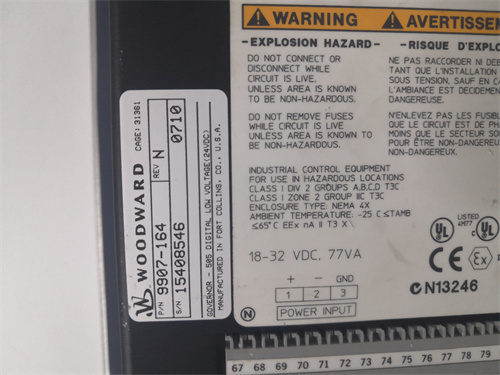
specification
Model: 9907-164
Brand: WOODWARD
Manufacturer: Woodward
Series: 505 digital speed control turbine
Parameters and specifications
Series: The 8200-1302 is part of the Woodward 505D series of digital governor turbine control products.
Power Supply: LVDC (18-32 Vdc) power supply with Marine/ATEX compliance.
Input voltage range: 18-36 VDC (isolated).
Operating temperature range: -22 to 158 degrees Fahrenheit (or -30 to 70 degrees Celsius).
Storage temperature range: same as operating temperature range, i.e. -22 to 158 degrees Fahrenheit (or -30 to 70 degrees Celsius).
Communication port: Supports Modbus communication port for configuration and communication.
Size and weight
Screen size: 8.4-inch LCD display.